Linear Interpolation
가장 간단한 보간법
두 점을 이은 직선의 방정식을 근사 함수로 사용한다.
데이터 점들 사이의 간격이 작을수록 더 좋은 근삿값을 얻는다.
$$
\mathrm{g}(x)=\frac{f\left(x_{i+1}\right)-f\left(x_i\right)}{x_{i+1}-x_i}\left(x-x_i\right)+f\left(x_i\right)
$$
Polynomial interpolation
(n+1)개의 점이 주어진 경우 n차 이하의 유일한 다항식을 구할 수 있다.
-
Q. n+1개의 점으로 찾을 수 있는 n차 다항식은 왜 유일한가?
방데르몽드 행렬
각 행의 초항이 1인 등비수열로 이루어진 행렬
$$ V=\left(\begin{array}{ccccc}1 & \alpha_1 & \alpha_1^2 & \cdots & \alpha_1^{n-1} \\ 1 & \alpha_2 & \alpha_2^2 & \cdots & \alpha_2^{n-1} \\ 1 & \alpha_3 & \alpha_3^2 & \cdots & \alpha_3^{n-1} \\ \vdots & \vdots & \vdots & & \vdots \\ 1 & \alpha_m & \alpha_m^2 & \cdots & \alpha_m^{n-1}\end{array}\right) $$방데르몽드 행렬
$V$에 대해 다음과 같이 일반화할 수 있다.$$ \operatorname{det} V=\prod_{i<j}\left(\alpha_i-\alpha_j\right) $$따라서,
$a_0,a_1,...,a_n$이 서로 다른 값을 가진다면$V$는 역행렬이 존재한다.가역 행렬의 기본 정리에 의해
$\tt Vx = b$의 해는 유일하다.
이제 다항식을 찾아내는 세 가지 방법을 알아보자.
미정 계수법
다항식을 찾는 가장 보편적인 방법
보간 다항식 $p(x) = a_0 + a_1x + a_2x^2 + ... + a_nx^n$에 대해
-
주어진
$n+1$개의 점을$p(x)$에 대입하여 연립 방정식을 생성한다.모두 다 대입하면 아래와 같이 방데르몽드 행렬식 형태를 얻을 수 있다.
$$ \begin{array}{cc}p\left(x_0\right)=f\left(x_0\right) & a_0+a_1 x_0+a_2 x_0^2+\cdots+a_n x_0^n=f\left(x_0\right)\\ p\left(x_1\right)=f\left(x_1\right) & a_0+a_1 x_1+a_2 x_1^2+\cdots+a_n x_1^n=f\left(x_1\right)\\ \vdots & \vdots \\ p\left(x_n\right)=f\left(x_n\right) & a_0+a_1 x_n+a_2 x_n^2+\cdots+a_n x_n^n+\left(x_n\right)\end{array} $$$$ \left[\begin{array}{ccccc}1 & x_0 & x_0^2 & \cdots & x_0^n \\ 1 & x 1 & x_1^2 & \cdots & x_1^n \\ & & & \cdots & \\ 1 & x_n & x_n^2 & \cdots & x_n^n\end{array}\right]\left[\begin{array}{l}a 0 \\ a 1 \\ \cdots \\ a n\end{array}\right]=\left[\begin{array}{c}f\left(x_0\right) \\ f\left(x_1\right) \\ \cdots \\ f\left(x_n\right)\end{array}\right] $$ -
가우스 소거법 등으로 연립 방정식의 해를 구한다.
단점
- 느린 계산 시간
- 오차 발생
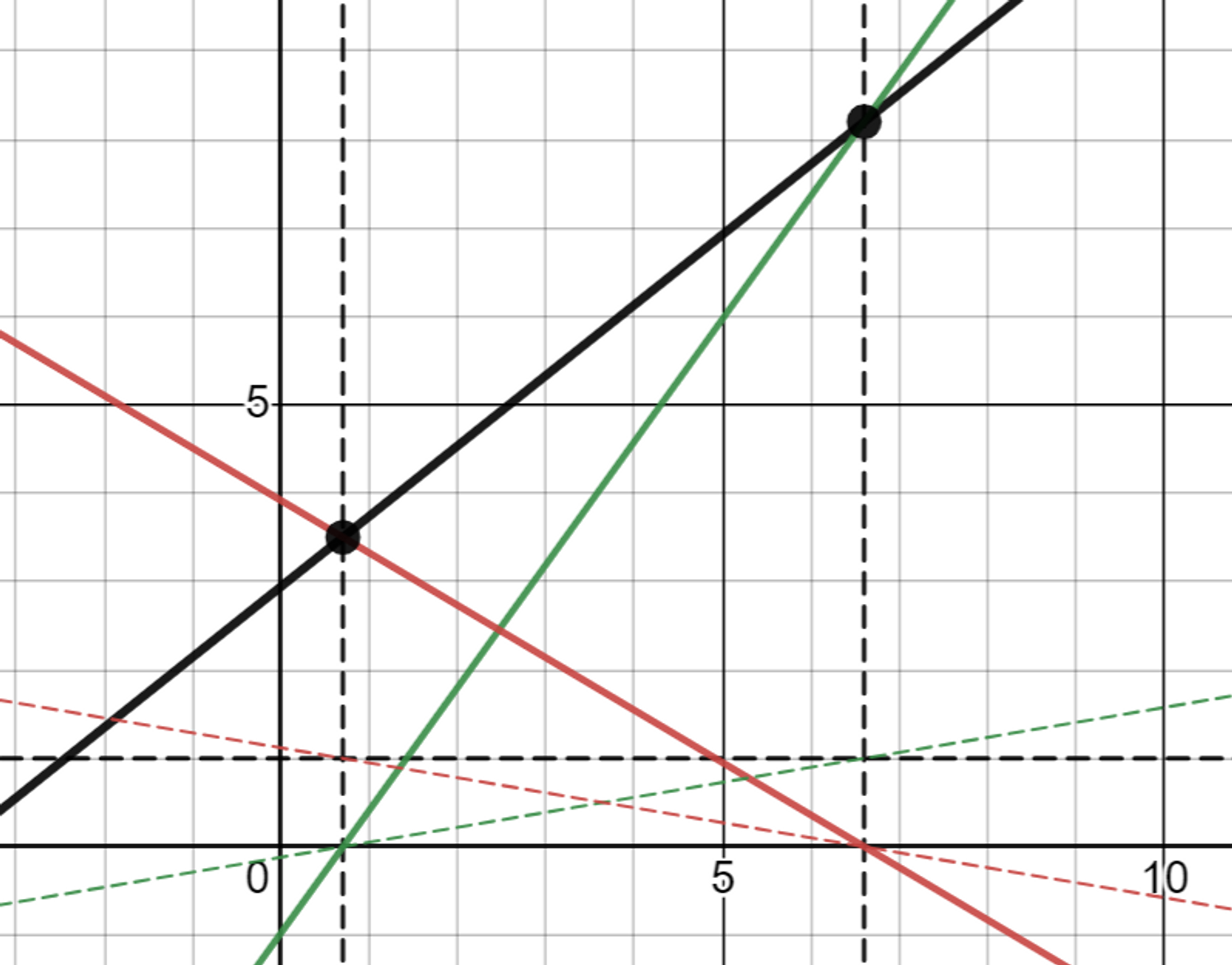
Lagrange Interpolation(라그랑주 보간법)
연립 방정식을 풀지 않고 다항식을 결정하는 방법
특정 숫자를 대입하면 0이나 1이 되는 항을 만든다.
$(x-a)$를 곱해주면$x$에 a값을 대입할 때 0이 된다.$(x-a)$를$(b-a)$로 나누면,$x$에$b$를 대입했을 때 1이 된다.
1차 함수
두 점$(x_0, y_0), (x_1, y_1)$이 주어진 경우
$$
y=\left(\frac{x-x_1}{x_0-x_1}\right) y_0+\left(\frac{x-x_0}{x_1-x_0}\right) y_1
$$
위 식에 $x_0$을 대입하면 $y_0$이 나오고, $x_1$을 대입하면 $y_1$이 나온다.
해당 식은 직관적으로 $(x_0,0),(x_1,y_1)$을 지나는 직선의 기울기와 $(x_0,y_0),(x_1,0)$을 지나는 직선의 기울기의 합으로 이해할 수 있다.
2차 함수
세 점$(x_0, y_0), (x_1, y_1), (x_2, y_2)$이 주어진 경우
$$
y=\left(\frac{\left(x-x_1\right)\left(x-x_2\right)}{\left(x_0-x_1\right)\left(x_0-x_2\right)}\right) y_0+\left(\frac{\left(x-x_2\right)\left(x-x_0\right)}{\left(x_1-x_2\right)\left(x_1-x_0\right)}\right) y_1\\
+\left(\frac{\left(x-x_0\right)\left(x-x_1\right)}{\left(x_2-x_0\right)\left(x_2-x_1\right)}\right) y_2
$$
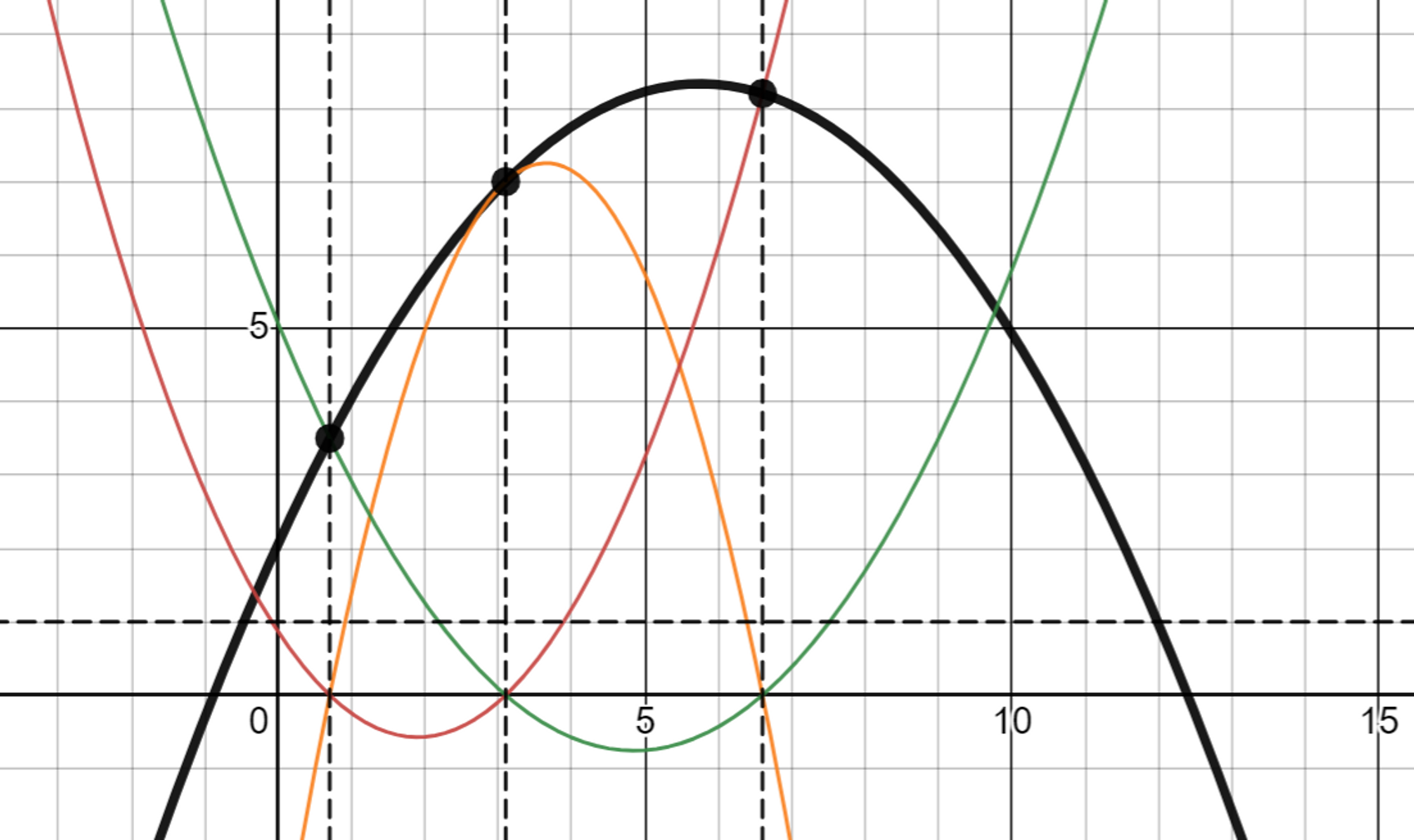
마찬가지로, $(x_i,y_i)$를 지나면서 $(x_j,0)$을 지나는 이차 함수의 기울기의 합으로 이해할 수 있다.
3차 함수
네 점이 주어진 경우
$$
y=\left(\frac{\left(x-x_1\right)\left(x-x_2\right)\left(x-x_3\right)}{\left(x_0-x_1\right)\left(x_0-x_2\right)\left(x_0-x_3\right)}\right) y_0\\
+\left(\frac{\left(x-x_2\right)\left(x-x_3\right)\left(x-x_0\right)}{\left(x_1-x_2\right)\left(x_1-x_3\right)\left(x_1-x_0\right)}\right) y_1\\
+\left(\frac{\left(x-x_0\right)\left(x-x_1\right)\left(x-x_3\right)}{\left(x_2-x_0\right)\left(x_2-x_1\right)\left(x_2-x_3\right)}\right) y_2\\
+\left(\frac{\left(x-x_0\right)\left(x-x_1\right)\left(x-x_2\right)}{\left(x_3-x_0\right)\left(x_3-x_1\right)\left(x_3-x_2\right)}\right) y_3
$$
일반화
$$
L_i(x)=\prod_{\substack{j=0 \\ j \neq i}}^n \frac{x-x_j}{x_i-x_j}
$$
위의 식은 곧 $x_i$를 넣었을 때 $y_i$가 나온다는 것을 의미한다.
$$
\begin{matrix}P_n(x)&=&L_0(x) f\left(x_0\right)+L_1(x) f\left(x_1\right)+\cdots L_n(x) f\left(x_n\right)\\
&=&\sum_{i=0}^n L_{i(x)} f\left(x_i\right)
\end{matrix}
$$
Q. 단일 함수를 구할 수 있는가?
$P_n\left(x_i\right)=y_i$를 만족하므로 $\mathrm{n}+1$개의 점 $\left(x_i, y_i\right)$을 지나는 유일한 $\mathrm{n}$차 다항식이다.
Q. 연산량이 기존 방법과 비교했을 때 늘어나는가, 줄어드는가?
단점
-
차수가 커지면 참 값을 기대할 수 없을 정도의 오차가 발생한다.
-
데이터의 수가 증가할 때, 바로 직전의 결과를 사용하지 못한다.
점이 추가되면 식을 처음부터 다시 계산해야 한다.
-
하나의 보간을 위해 필요한 계산량이 많다.
그렇다면, 식을 처음부터 다시 계산하지 않는 방법은 없을까?
결국 라그랑주 보간법은 각 점을 지나는 함수의 기울기를 합산하는 방식이기 때문에, 기울기가 중복으로 계산되는 지점을 제거하여 연산량을 줄일 수 있다. 이를 위해 Divided Difference이 쓰인다.
Newton’s divided differences interpolation
라그랑주 보간법의 모든 단점을 해결하는 방법
- 점 두 개로 일차 함수를 먼저 그린 후, 점을 추가해나가며 다항식의 차수를 점점 확장해나가는 방식
- 연립 일차 방정식을 사용하지 않는다.
- 뉴턴 형을 활용한다.
Divided Differences(분할 차분법)
간단 요약
분할 구간에서 함수값들의 차이
기울기에 대한 이산적인 추정치로 사용할 수 있다.
뉴턴 형이 주어졌을 때, 상수 항들을 어떻게 계산해야 할까?
뉴턴 형
서로 다른 점 $x_0, ..., x_n$에 대해 x값에 따라 상수 항들을 순서대로 구할 수 있는 형태
$$
\begin{matrix}P_n(x)=a_0+a_1\left(x-x_0\right)
+a_2\left(x-x_0\right)\left(x-x_1\right)+\\
\ldots+a_n\left(x-x_0\right)\left(x-x_1\right) \ldots\left(x-x_{n-1}\right)\end{matrix}
$$
식이 복잡하게 생겼다. $P_n(x) = f(x)$라 정의하고, 식을 상수 항 기준으로 정리해보자.
$a_0, a_1$ 도출 과정
$$
a_0 = f\left(x_0\right)\\
f(x_1) = a_0 + a_1(x_1-x_0),\\
\therefore a_1 = {f\left(x_1\right) - f(x_0)\over x_1-x_0}
$$
해당 식의 형태를 $f[x_0,x_1]$로 치환하자.
이는 first order Divided Difference라고 부른다.
first order Divided Difference
$$
f\left[x_0, x_1\right]=\frac{f\left(x_1\right)-f\left(x_0\right)}{x_1-x_0}
$$
한글로 번역하면 1차 분할 차분인데, 이는 위의 수식이 1차 미분에 대한 이산적인 추정치로 쓰일 수 있기 때문이다.
만약 $f(x)$가 구간 $[x_0,x_1]$에서 미분 가능하다면, 평균값 정리에 의해$f\left[x_0, x_1\right]=f^{\prime}(c)$임을 보장한다.
$a_2$ 도출 과정
$$
\begin{matrix}
f(x_2) &=& a_0 + a_1(x_2 - x_0) + a_2(x_2-x_0)(x_2-x_1)\\
&=& f(x_0) + (x_2 - x_0)(a_1 + a_2(x_2 - x_1)),\\
f(x_2) - f(x_0) &=& (x_2-x_0)(a_1 + a_2(x_2 - x_1))
\end{matrix}
$$
이고, 이를 좀 더 정리하면
$$
\frac{f(x_2)-f(x_0)}{x_2-x_0} = a_1 + a_2(x_2 - x_1)
$$
이 된다.
여기서, $a_1$과 $a_2$에서 반복되는 형태를 $f[x_a,x_b]$로 치환하자.
$$
f[x_0,x_2] = f[x_0,x_1] + a_2(x_2 - x_1)\\
\frac{f[x_0,x_2] - f[x_0,x_1]}{x_2 - x_1} = a_2\\
$$
위 식은 $f[x_0,x_1,x_2]$로 치환하며, Second order Divided Difference라고 부른다.
High order Divided Difference
$$
f\left[x_0, x_1, x_2\right]=\frac{f\left[x_1, x_2\right]-f\left[x_0, x_1\right]}{x_2-x_0}
$$
$$
f\left[x_0, x_1, x_2, x_3\right]=\frac{f\left[x_1, x_2, x_3\right]-f\left[x_0, x_1, x_2\right]}{x_3-x_0}
$$
$$
f\left[x_0, \ldots, x_n\right]=\frac{f\left[x_1, \ldots, x_n\right]-f\left[x_0, \ldots, x_{n-1}\right]}{x_n-x_0}
$$
이와 같은 형태로 나머지 $a_n$에 대해서도 정리할 수 있고, 최종적으로 기존의 뉴턴 형은 다음과 같은 형태가 된다.
$$
\begin{aligned}& P_1(x)=f\left(x_0\right)+\left(x-x_0\right) f\left[x_0, x_1\right] \\
& \begin{aligned}P_2(x)=f\left(x_0\right) & +\left(x-x_0\right) f\left[x_0, x_1\right] \\
& +\left(x-x_0\right)\left(x-x_1\right) f\left[x_0, x_1, x_2\right]\end{aligned}\\
&\ \ \ \ \ \ \ \ \ \ \ \ \vdots\\
&\begin{aligned}P_n(x)=f\left(x_0\right) & +\left(x-x_0\right) f\left[x_0, x_1\right]+\cdots \\
& +\left(x-x_0\right)\left(x-x_1\right) \cdots\left(x-x_{n-1}\right) f\left[x_0, x_1, \ldots, x_n\right]\end{aligned}\end{aligned}
$$
여기에서 중요한 점은, 기호화를 함으로써 값을 재활용할 수 있게 되었다는 것이다.
또한, 기존의 값을 활용하여 다음 값을 구할 수 있게 되었다.
최종적으로 뉴턴 공식을 일반화하여 정리하면 다음과 같은 형태가 된다.
$$
\begin{aligned}P_n(x) & =f\left[x_0\right]+f\left[x_0, x_1\right]\left(x-x_0\right)+\cdots\\
&\ \ \ \ \ \ \ \ \ \ \ \ \ \ +f\left[x_0, \cdots, x_n\right]\left(x-x_0\right) \cdots\left(x-x_{n-1}\right) \\
& =f\left[x_0\right]+\sum_{k=1}^n f\left[x_0, \cdots, x_k\right]\left(x-x_0\right) \cdots\left(x-x_{k-1}\right) \\
& =f\left[x_0\right]+\sum_{k=1}^n f\left[x_0, \cdots, x_k\right] \prod_{i=0}^{k-1}\left(x-x_i\right)\end{aligned}
$$
이를 점화식의 형태로 정리하면 다음과 같다.
$$
p_{n+1}(x)=p_n(x)+f[x_0, x_1, \cdots, x_n, x_{{n+1}}] \prod_{j=0}^n(x-x_j)
$$
2. Error in polynomial interpolation
보간 다항식은 결국 실제 함수에 대한 추정이기 때문에, 오차가 존재한다.
라그랑주 보간법의 오차를 계산해보자.
앞에서 $P_n(x)$를 다음과 같이 정리했다.
$$
\begin{matrix}P_n(x)&=&L_0(x) f\left(x_0\right)+L_1(x) f\left(x_1\right)+\cdots L_n(x) f\left(x_n\right)\\
&=&\sum_{i=0}^n L_{i(x)} f\left(x_i\right)
\end{matrix}
$$
$f(x):$구간$[a,b]$에서 정의된 함수(실제 함수)$p_n(x): n+1$$n+1$$f(x)$의 보간 다항식
이라 했을 때, 다음이 성립한다.
$$
f(x)=P_n(x) + \frac{\left(x-x_0\right)\left(x-x_1\right) \cdots\left(x-x_n\right)}{(n+1) !} f^{(n+1)}\left(c_x\right)
$$
-
$c_x : [a,b]$구간 내 임의의 점 -
증명 과정
-
실제 함수
$f(x)$와 보간 다항식$P_n(x)$의 차이에 대한 함수를$R_n(x)$라 하자.$(x \neq x_k)$즉,
$f(x) = P_n(x) + R_n(x)$가 성립하는 상황에서,$R_n(x)$는$x_k$마다 0이 되기 때문에 다음과 같이 정의할 수 있다.$$ R_n(x)=C \prod_{k=0}^n\left(x-x_k\right) $$$C$는 상수를 의미한다.
-
새로운 함수
$F(x)$를$$ F(x) = f(x) - P_n(x) - R_n(x) $$라고 할 때,
-
**롤의 정리(Rolle’s Theorem)**에 의해
$\mathrm{n}$개 점에서 함수가 0이면,$\mathrm{n}-1$차 미분의 값이 0인 점이 존재한다.$\mathrm{g}(\mathrm{t})$는$x, x_0, x_1, \ldots, x_n$의 구간으로$\mathrm{n}+2$개의 함수가 0 인 점이 존재하므로,$\mathrm{n}+1$차 미분이 0 인 점$c_x$가 존재한다.$$ f^{n+1}(c_x)-P^{n+1}(c_x)-[f(x)-P(x)] \frac{d^{n+1}}{d t^{n+1}}\left[\Pi_{i=0}^n \frac{t-x_i}{x-x_i}\right]_{t=c_x} $$$\mathrm{P}$는 최대$\mathrm{n}$차식이므로$P^{n+1}=0$
-
$g^{n+1}(c_x)=0=f^{n+1}(c_x)-0-f(x)-P(x) ! \Pi_{i=0}^n \frac{1}{x-x_i}$$\left(t-x_i\right)$는$\mathrm{n}+1$차항이므로$\mathrm{n}+1$번 미분하면$(\mathrm{n}+1)!$
-
위 식을
$\mathrm{f}(\mathrm{x})$에 대해 정리하면 다음과 같다.$$ f(x)=P(x)+\frac{f^{n+1}(c_x)}{(n+1) !}\left(x-x_0\right)\left(x-x_1\right) \ldots\left(x-x_n\right) $$
결론적으로, 오차(실제 함수 - 보간 다항식)는 다음과 같이 정의된다.
$$ e_n(x)=f(x)-P_n(x) $$$$ f(x)-P(x)=\frac{f^{n+1}(c_x)}{(n+1) !}\left(x-x_0\right)\left(x-x_1\right) \ldots\left(x-x_n\right) $$- 최대 오차는
$\max \|\frac{f^{n+1}(c_x)}{(n+1) !}\| \cdot \max \|\left(x-x_0\right)\left(x-x_1\right) \ldots\left(x-x_n\right)\|$
-
-
$f(x):$구간$[a,b]$에서 정의된 함수(실제 함수) -
$p_n(x): n+1$$n+1$$f(x)$의 보간 다항식이라 했을 때, 오차(실제 함수 - 보간 다항식)는 다음과 같이 정의된다.
$$
e_n(x)=f(x)-p_n(x)
$$
따라서 다음이 성립한다.
$$
\begin{aligned}
& p_{n+1}\left(x_i\right)=f\left(x_i\right), \quad i=0,1,2, \cdots, n \\
& p_{n+1}(\bar{x})=f(\bar{x})
\end{aligned}
$$
뉴턴 공식으로 다시 표현하면
$$
p_{n+1}(x)=p_n(x)+f\left[x_0, x_1, \cdots, x_n, \bar{x}\right] \prod_{j=0}^n(x-x_j)
$$
과 같고, 이 때의 $f(x)$는 다음과 같다.
$$
f(\bar{x})=p_{n+1}+f\left[x_0, x_1, \cdots, x_n, \bar{x}\right) \prod_{j=0}^n\left(\bar{x}-x_j\right)
$$
아래에서 표현된 식들로 오차에 대한 식을 다시 정리해보면
$$
e_n(\bar{x})=f\left[x_0, x_1, \cdots, x_n, \bar{x}\right] \prod_{j=0}^n\left(\bar{x}-x_j\right)
$$
위처럼 나타낼 수 있다.
그렇다면 과연 뉴턴 보간법은 단점이 없을까? 그렇지 않다.
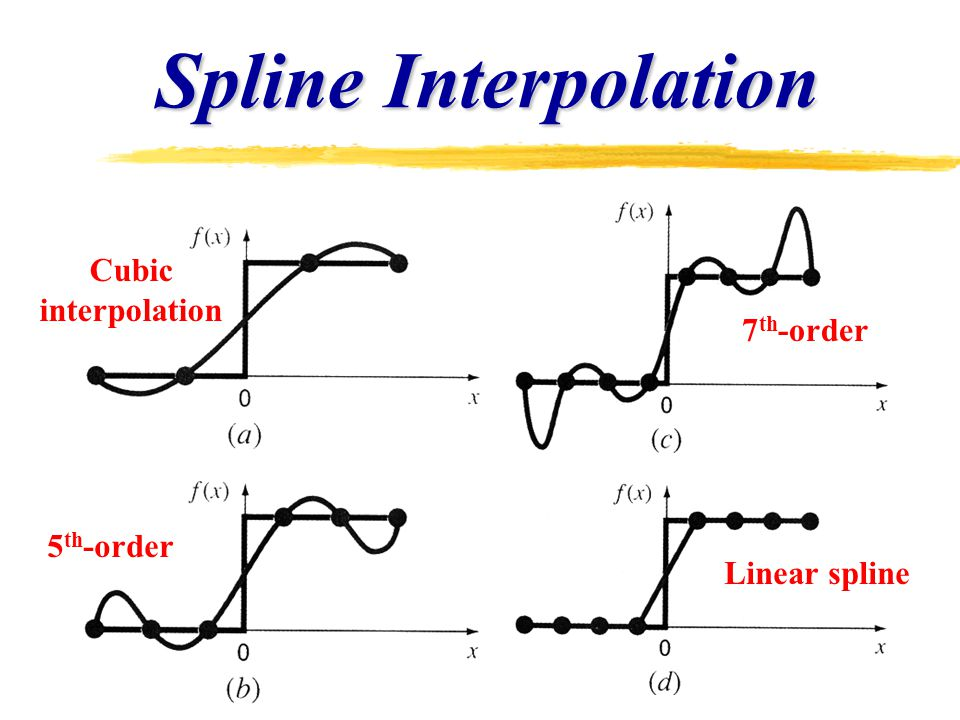
3. Spline Interpolation
뉴턴 보간법과 라그랑주 보간법은 계단 함수와 같은 급격한 불연속을 잘 표현하지 못한다.
-
Runge 현상
Runge 함수는 Polynomial로 적합이 잘 되지 않는 함수로 알려져 있다.
$$ f(x)=\frac{1}{1+25 x^2} $$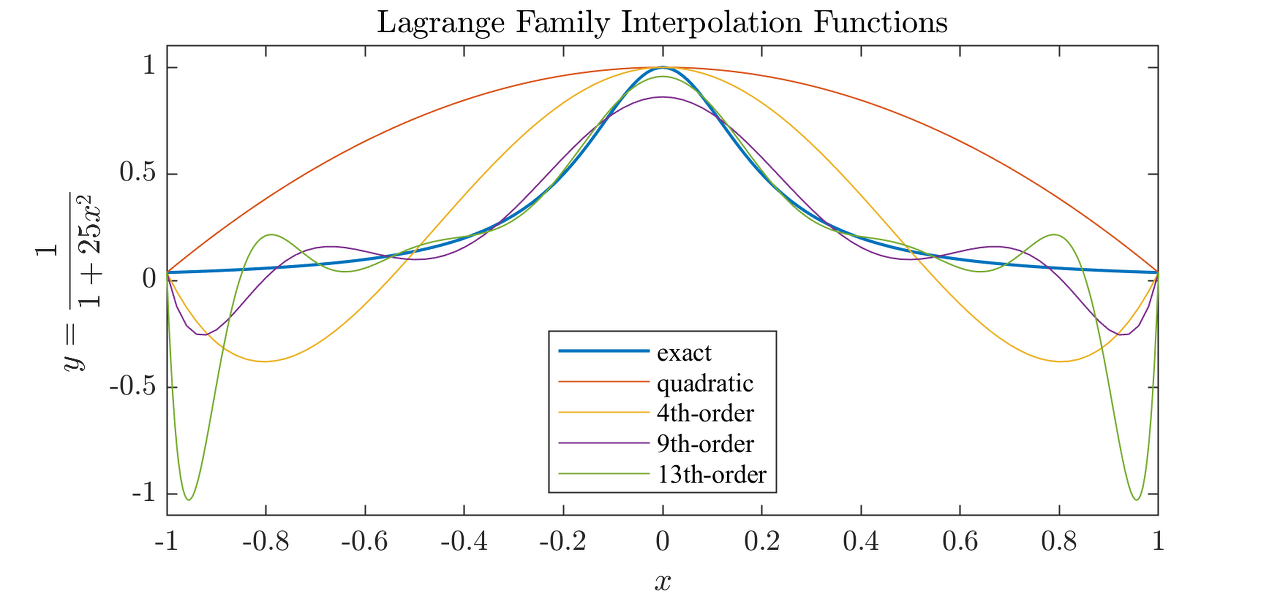
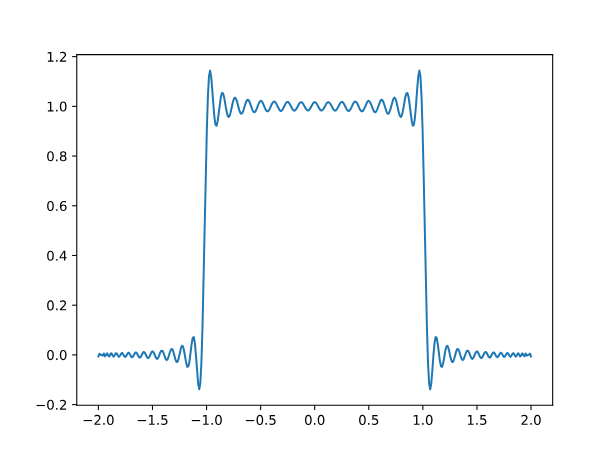
-
Gibbs 현상 불연속 함수를 근사할 때 불연속 값 근처에서 나타나는 불일치 현상
Piecewise Polynomials Interpolation
여러 개의 데이터를 하나의 추정 함수로 표현하지 않고, 구간 별로 추정 함수를 구하는 것
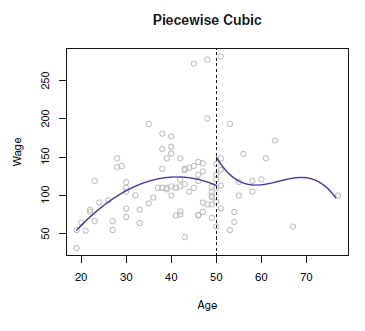 사진은 Interpolation이 아니라 Regression에 해당하지만, Piecewise Polynomial에 대한 이해를 돕기 위해 가져왔다.
사진은 Interpolation이 아니라 Regression에 해당하지만, Piecewise Polynomial에 대한 이해를 돕기 위해 가져왔다.
다만, 사진처럼 knot에서 불연속이기 때문에, 합리적이지 않은 추정 함수가 나올 수 있다.
Continuous Piecewise Polynomials Interpolation
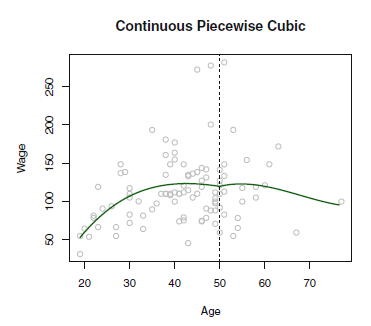
Piecewise에 연속이라는 제약 조건을 추가했다.
하지만 여전히 만족스럽지 않다.
Spline
- 각 지점(knots)에서 자기 자신과 1차 미분 함수부터
$d-1$차 미분 함수까지 모두 연속이다. - knot에서 함수의 계수가 변하므로 knot가 많을 수록 더 유연하게 된다.
점과 점 사이를 그저 연결하면 Linear Spline이 되기 때문에, 선형 스플라인은 잘 활용하지 않는다.
2차 Spline부터 알아보자.
Quadratic Spline Interpolation
n+1개의 점을 연결하는 n개의 2차 다항식을 추정하고자 한다.
각 2차 다항식마다 $ax^2 + bx + c$와 같이 3개의 미지수가 존재하기 때문에,
모든 다항식을 추정하기 위해서 $3n$개의 조건이 필요하다.
이러한 $3n$개의 조건은 적절한 제약을 추가하여 얻을 수 있다.
-
첫 번째 함수와 맨 마지막 함수는 각각 첫 번째 점과 마지막 점을 지나야 한다.
이로부터 2개의 조건을 얻을 수 있다.
$
\begin{aligned}& f\left(x_0\right)=a_1 x_0^2+b_1 x_0+c_1 \\ & f\left(x_n\right)=a_n x_n^2+b_n x_n+c_n\end{aligned}$이제 나머지 n개의 조건을 얻으면 된다.
-
양 끝을 제외한 n-1개의 점에서 함수가 연속해야 한다.
즉, 각 내부의 점에서 n개의 함수는 양 끝 점을 지나야 한다.
이로부터
$2n-2$개의 조건을 얻을 수 있다.$i=2\dots n$일 때,$f\left(x_{i-1}\right)=a_{i-1} x_{i-1}^2+b_{i-1} x_{i-1}+c_{i-1}:$주어진$i-1$번째 데이터의 왼쪽 함수$f\left(x_{i-1}\right)=a_i x_{i-1}^2+b_i x_{i-1}+c_i:$주어진$i-1$번째 데이터의 오른쪽 함수 -
모든 점에서 함수가 매끄러워야 한다. 즉, 모든 knots에서 미분 가능해야 한다.
$i=2\dots n$일 때,$f^{\prime}\left(x_{i-1}\right)=2 a_{i-1} x_{i-1}+b_{i-1}$: 주어진$i-1$번째 데이터의 왼쪽 1차 도함수$f^{\prime}\left(x_{i-1}\right)=2 a_i x_{i-1}+b_i$: 주어진$i-1$번째 데이터의 왼쪽 1차 도함수이를 통해
$n-1$개의 조건을 얻을 수 있다.이제 단 하나의 조건만 있으면 된다.
-
첫 번째 함수의 이계 도함수는 0이다. 즉, 첫 번째 함수는 직선이다.
$f_1''(x_0) = a_1 = 0$
이렇게 총 $3n$개의 조건을 얻었으므로, $n$개의 2차 다항식을 추정할 수 있다.
Cubic Spline Interpolation
2차 Spline 보간법과 마찬가지 이유로 이번에는 $4n$개의 조건이 필요하다.
- 첫 번째와 마지막 함수는 각 양 끝 점을 지난다. →
$2$ - 연속 →
$2n - 2$ - 미분 가능(1계 도함수 연속) →
$n-1$ - 2계 도함수 연속 →
$n-1$
여기까지 계산하면 총 $4n - 2$로 2개의 조건이 부족해 유일 해를 구할 수 없다.
따라서 다음과 같은 임의의 조건을 추가하여 유일 해를 채울 수 있다.
- 첫 번째 함수와 마지막 함수의 2계 도함수는 0이어야 한다. →
$2$
이러한 다섯 개의 조건으로 보간된 곡선을 Natural Cubic Spline이라고 한다.
4차 이상의 고차 스플라인은 내재된 불안정성 때문에 잘 사용하지 않기 때문에, Cubic Spline을 가장 많이 활용한다.
참고 자료
회귀 스플라인 (Regression Spline)에 대한 이해
[interpolation] - Spline method
[ISL] 7장 -비선형모델(Local regression, Smoothing splines, GAM) 이해하기 · Go’s BLOG